TamuHack 25'
 Hi-5
Hi-5
Inspiration
My inspiration came from watching Iron Man as a kid. The famous line, “Tony Stark built this in a cave… with a box of scraps!” stuck with me, showing how creativity and determination can overcome any obstacle. It made me believe, “If he can build it there, then so can I.” Now, as I approach graduation, creating something like this has been a lifelong dream. I’m proud to have turned that dream into reality and see it fully functional.
What it Does
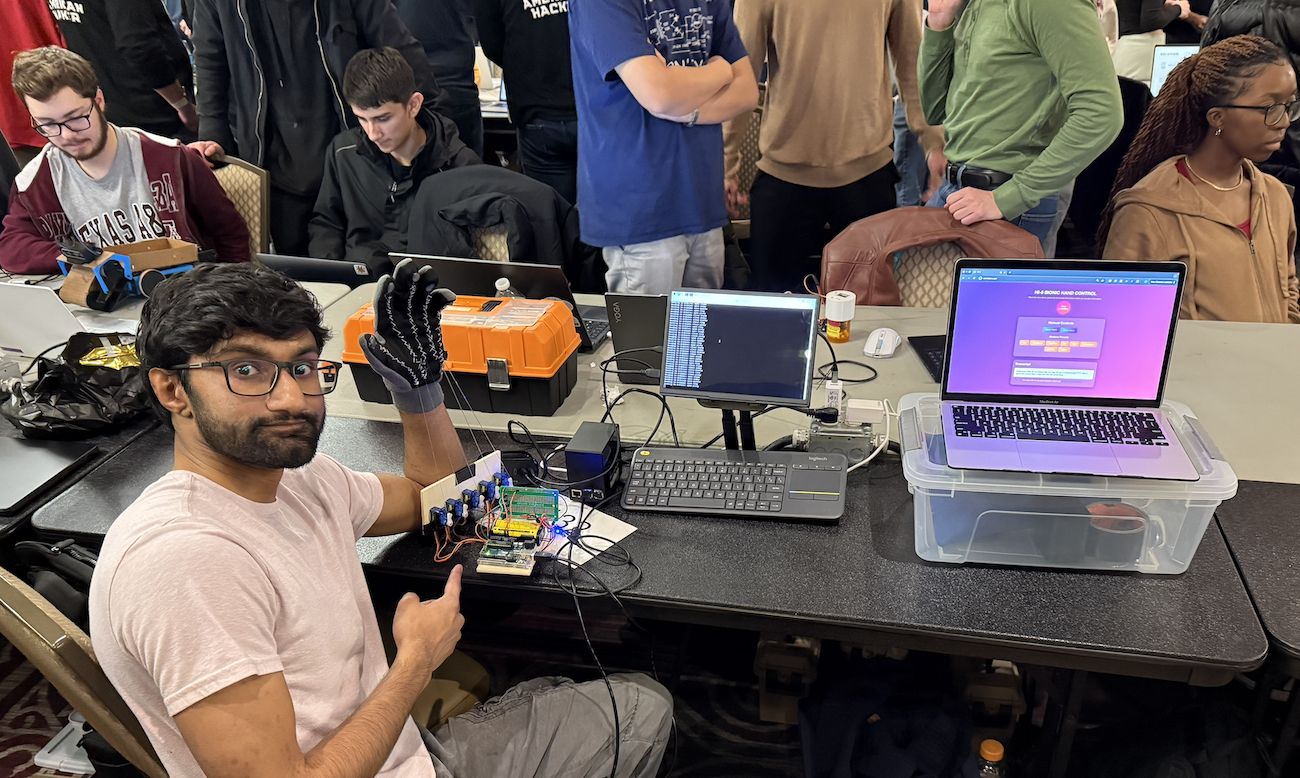
Hi-5 is a versatile assistive glove designed to help individuals with limited hand mobility caused by various conditions, such as stroke recovery, neurological disorders, arthritis, or paralysis. By aiding rehabilitation, physical therapy, and assisting paralyzed limbs, Hi-5 helps users regain strength, precision, and control in their hands.
The voice control feature makes it incredibly user-friendly, allowing users to perform movements effortlessly through simple commands, even if they have minimal mobility or experience with technology. While this prototype focuses on the hand, the concept can be extended to other limbs for broader applications, ensuring accessibility and functionality for a wide range of users.
How I Built It
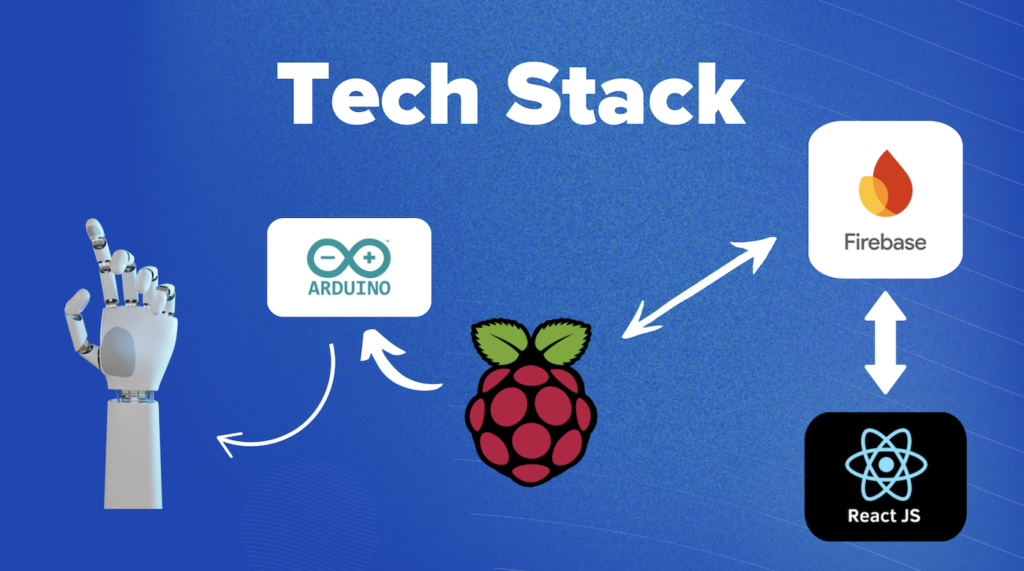
The glove uses elastic strings attached to servo motors that mimic tendon-like movements. These strings are sewn onto the glove in a way that facilitates natural finger movement. The servos are connected to a servo motor driver, which interfaces with an Arduino Uno.
The Arduino listens to serial commands, dictating which fingers to open or close. These commands are sent via a USB connection to a Raspberry Pi 5, which acts as an intermediary processor. The Raspberry Pi updates finger movements based on changes in a Firebase Realtime Database.
On the software side, the ReactJS front end provides a user-friendly interface where users can input commands, which are stored in the Firebase database. For voice control, I utilized a React library for natural language processing (NLP) that normalizes commands and maps them to specific finger movements. Together, these systems ensure smooth, responsive functionality.
Challenges I Ran Into
There were numerous challenges along the way. Learning how to sew the elastic strings onto the glove while maintaining durability was unexpectedly tricky. Understanding servo motor mechanics, balancing power requirements, and overcoming technical issues were ongoing hurdles. Each time I fixed one problem, another would arise, but persistence kept me going.
Accomplishments That I Am Proud Of
This was my first solo hackathon project, and I’m incredibly proud of how much I accomplished in such a short time. It was rewarding to see all the skills I’ve learned over the years—programming, hardware integration, and problem-solving—come together in one functional product.
What I Learned
This project was my first deep dive into mechatronics and working with servo motors, which was a steep but exciting learning curve. I also picked up unexpected skills, like sewing elastic components, while gaining hands-on experience integrating a wide variety of technologies, from hardware to cloud databases. Seeing it all work together was an incredible experience.
What’s Next for Hi-5
Although Hi-5 is functional, there’s plenty of room for improvement. I plan to:
- Add more sensors for feedback and adaptive functionality.
- Deliver greater power and precision to improve reaction times and performance.
- Refine the design for enhanced comfort and usability.
- Expand its applications beyond the hand, extending it to other limbs.
Hi-5 started as a passion project, but I hope to continue developing it into something even more extraordinary.